团队负责人:
甘屹 工学博士,教授,博士生导师。中国机械工程学会机械工业自动化分会委员,上海市教委曙光学者,日本中央大学理工学部精密机械工学科共同研究员,上海市青联联合会委员。主要研究方向:先进制造技术,智能制造技术,现代设计理论与方法。主持2项国家自然科学基金项目,主持或参与国家科技重大专项及省部级科研项目多项,发表论文四十余篇,其中JCR 1区论文2篇,日本JSME期刊论文1篇;编著高校教材4部,发明专利授权6项。获得上海市科技进步奖一等奖1项,高等学校科学研究优秀成果奖科技进步奖二等奖1项,上海市教学成果一等奖1项,上海市科教党委系统青年科技创新人才奖。
团队成员 | |
姓名 | 研究方向 |
杨丽红 | 人工智能,优化设计 |
何伟铭 | 精密测量,现代设计 |
孙福佳 | 智能控制,机器人 |
一、自动柔性化喷胶工作站简介
制鞋行业中人工刷胶劳动力成本高,对工人健康危害大,为解决人工刷胶的弊端,研制了全自动柔性化喷胶工作站。该工作站集视觉系统、工业机器人、喷胶系统于一体。视觉系统是整个设备的核心部分,完成基于双目立体视觉原理的视觉系统实现鞋底图像采集,重构鞋底表面模型,提取鞋底边缘三维数据等功能。

工作站整体图
根据功能实现和工作过程,视觉系统具体分为标定模块,鞋底表面重构模块,通信模块和误触发图像清除四个模块。
1、标定模块,完成相机参数标定,标定误差评定和世界坐标系确定;
2、鞋底表面重构模块,实现图像采集,鞋底表面数据生成功能,自动生成鞋底边缘轮廓位置数据与法向数据。
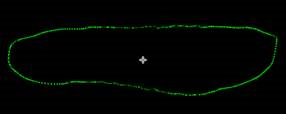
鞋底边缘轮廓
3、通信模块,实现机器人与计算机的通信,机器人按指令执行喷胶工作;

机器人喷胶
4、误触发图像清除模块,自动清除鞋底触发过程中采集到的多余图像或同一鞋底被多次触发的误触发图像,提高系统连续作业的可靠性。
二、成果的技术指标
全自动柔性化喷胶工作站具有如下优点:
1、鞋样可以随意摆放,需固定装置或模具;
2、可识别不同型号,不同尺寸的鞋样,适应性强;
3、流水线无需停止,缩短生产周期;
4、全新喷胶系统,雾化小,节约胶水,可实现自动清洗。
主要技术指标如下:
相机型号 | TXG50C |
相机个数 | 3 |
视场大小(mm X mm) | 250X400 |
焦距(mm) | 5 |
调焦方式 | 手动 |
工作距离(mm) | 250 |
测量精度X方向(mm) | 0.1 |
测量精度Y方向(mm) | 0.1 |
测量精度Z方向(mm) | 0.6 |
通讯协议 | TCP,IPv4/IPv6 |
接口 | Gige/触发 |
工作温度(度) | -20~80 |
处理时间(s) | 2 |
三、技术的成熟度
技术成熟,适用于不同颜色,不同大小,不同形状的鞋底自动喷胶,可量产。
四、智能仓储系统简介:
传统仓储难以满足现代物流的需求,研发了智能立体仓储系统,利用计算机网络系统,完成单元货物的自动存取,提高货物的存取效率和仓储管理水平。智能仓储系统硬件部分包括立体货架、智能穿梭车、出入库系统等,软件系统包括WMS(仓储管理系统)、WCS(仓储控制系统)以及数字孪生模型等。
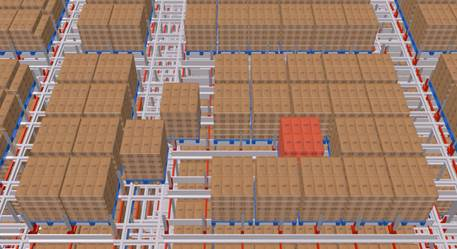
智能仓储效果图
1、WMS对入库、出库、盘库、库存信息和系统等进行统一管理,实现仓储智能化管理;
2、WCS系统实时接收WMS系统下达的任务指令,分解并通过作业接口层下达给具体的作业执行层,对智能穿梭车进行统一的调度,并对各个环节、现场关键设备及工艺点进行监视、控制;
3、 数字孪生模型展示了智能密集仓库实时运行的情况,包括穿梭车、提升机实时动态情况及位置,通过三维的形式查询已检、未检等状态,在三维仿真中以不同的颜色显示不同的状态,点取货位,实时查询货位状态、种类、批号、数量等信息;
4、 智能穿梭车,实时响应上位系统的指令,快速高效实现货品出入库等操作。
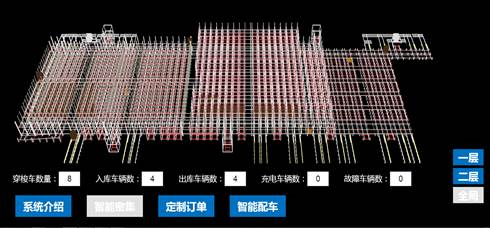
智能仓储数字孪生三维实时动态监控系统
五、成果的主要优点和指标
1、仓库作业全部实现机械化和自动化;
2、采用高层货架、立体储存,有效地利用空间,减少占地面积,降低土地购置费用;
3、采用托盘或货箱储存货物,货物的破损率显著降低;
4、货位集中,便于控制与管理,实现作业过程的自动控制和信息自动处理;
5、客制化服务,用户自定义需求。
六、技术的成熟度:
目前处于调试阶段。
版权所有:1066vip威尼斯(中国)有限公司
地址:上海市军工路516号